TOPCON:GT

2024年7月16日公開
※ TS側でPINコードが設定されていると、接続できない場合があります。
TSのPINコードは設定しないようにしてください。
接続方法 : Bluetooth
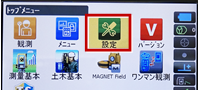
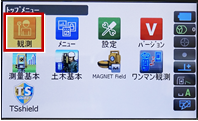
1 [設定]を選択します。
2 [通信]を選択します。
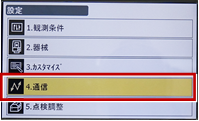
3 [ 通信モード ]を選択します。

4 [通信モード]を「Bluetooth」に設定して[ENT]を押します。

5 [ 通信タイプ]を選択します。
6 [ Sタイプ]を選択します。
7 次のように設定して[ENT]を押します。
チェックサム:「なし」
コントローラー:「全て」

8 [Tタイプ]を選択します。
9 次のように設定し[ENT]を押します。
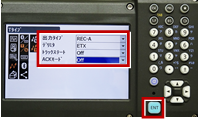
出力タイプ:「REC-A」
デリミタ:「ETX」、トラックステート:「Off」
ACKモード:「Off」
10 [PRG]を押します。
11 [設定]を選択します。

12 [観測条件]を選択します。
13 [ サーチ/追尾 ]を選択します。
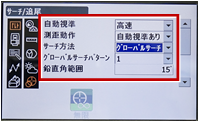
14 次のように設定します。
自動視準:「高速」
測距動作:「自動追尾あり」
サーチ方法:「グローバルサーチ」
グローバルサーチパターン:「1」
鉛直角範囲:「15°」
※RC(リモートキャッチャー)を使用する 場合は、
サーチ方法:「RC-コントローラー」
に設定します。

15 画面を下にスクロールして、次のように設定し[ENT]を押します。
水平角範囲:「15°」
追尾測定:「スタンダード」
追尾予測時間:「2秒」
追尾ウェイト時間:「3600秒」
指定角旋回精度:「5“」

16 [PRG]を押します。
17 [ 観測 ]を選択します。

18 観測を行います。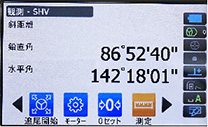
RECの設定
(TS側から出力する場合のみ設定します。)
※FIELD-POCKETは「HVDアウトS」 (距離観測あり)のみ対応しています。
1 [設定]を選択します。

2 [カスタマイズ]を選択します。
3 [観測]を選択します。
4 [操作アイコン]を選択します。
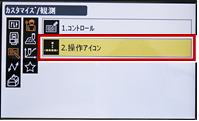
5 操作アイコンを入れ替える位置を選択します。(下図例 「モーター」)

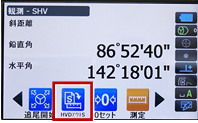
6 [HVDアウトS]を選択します。
※「HVDアウトT」もあるので間違えないようにしてください。

7 [ESC]を押します。
([HVDアウトS]が選択されない場合は [ENT]を押してください。)

8 [PRG]を押します。

10 [HVDアウトS]を選択して観測します。