Q:後方交会法にて器械設置する場合の概要と制限

2025年7月17日公開
【器械設置完了までの概要とその流れ】
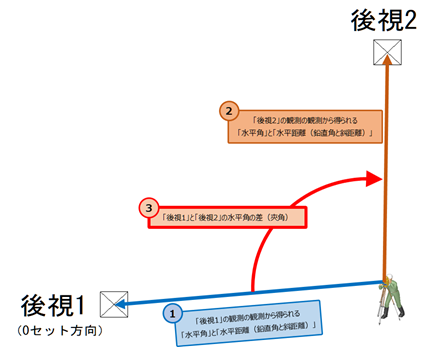
1. 「後視1」「後視2」のそれぞれの観測から以下の値を取得・計算します。
①「後視1」を観測して「水平角」と「水平距離(鉛直角と斜距離)」
②「後視2」を観測して「水平角」と「水平距離(鉛直角と斜距離)」
③「後視1」 と「後視2」の水平角の差(夾角)
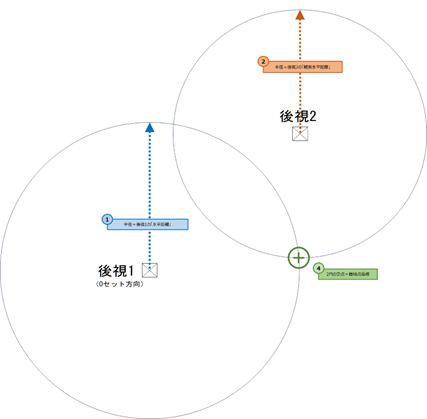
2. 中心を「後視1」の既知点XY座標、半径を①で得た「後視1」から「器械点」間の水平距離とする円を作成します。「後視2」についても同様に円を作成します。
作成した2円の交点を
④「器械点座標」
としてXY座標を求めます。
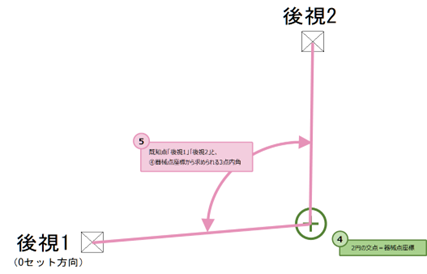
3. ④「器械点座標」が、許容誤差範囲内かどうかをチェックします。
まず、④「器械点座標」と、「後視1」「後視2」の既知点座標を使用して、
⑤「3点内角」
を求めます。
求めた ⑤「3点内角」と、③「水平角の差」(実際の観測値)を比較し、「1秒以内」であれば許容誤差範囲内とみなし、器械点座標として採用します。
3点目を後視観測した場合は、同様に2点目と3点目の観測値から上記の計算・確認を繰り返し、
「1点目と2点目の観測から得られた器械点座標」
と、
「2点目と3点目の観測から得られた器械点座標」
を平均した座標が、器械点座標として採用されます。
メモ
上記 ⑤「3点内角」と、③「水平角の差」(実際の観測値)が「1秒」をこえた場合は、誤差が大きいと判断して「器械点座標が求まっていません。後視点を確認してください。」とエラー表示し、再測等を求めます。
この場合、器械設置が終了せず、観測に進めません。
上記 ⑤「3点内角」と、③「水平角の差」(実際の観測値)が「1秒」をこえた場合は、誤差が大きいと判断して「器械点座標が求まっていません。後視点を確認してください。」とエラー表示し、再測等を求めます。
この場合、器械設置が終了せず、観測に進めません。
メモ
後視点間の水平角の差(夾角)が「30°~150°」外の場合は、「夾角が30°~150°の範囲外です。精度が下がる可能性があるのでご確認ください。」とメッセージが表示されます。
こちらは注意喚起であり、器械設置およびその後の観測は可能です。
後視点間の水平角の差(夾角)が「30°~150°」外の場合は、「夾角が30°~150°の範囲外です。精度が下がる可能性があるのでご確認ください。」とメッセージが表示されます。
こちらは注意喚起であり、器械設置およびその後の観測は可能です。
メモ
観測中に表示される「観測誤差」は、上記計算とは別に計算されます。
「後視2点の既知点XY座標から計算した水平距離」
と、
「後視2点を実際に観測して得た点間距離」
の差が表示されます。
この値は目安であり「◯mm以上の誤差だったら、器械設置できない」といった制限はありません。
観測中に表示される「観測誤差」は、上記計算とは別に計算されます。
「後視2点の既知点XY座標から計算した水平距離」
と、
「後視2点を実際に観測して得た点間距離」
の差が表示されます。
この値は目安であり「◯mm以上の誤差だったら、器械設置できない」といった制限はありません。
ページの先頭へ戻る