点群のスムーズな高速処理を実現
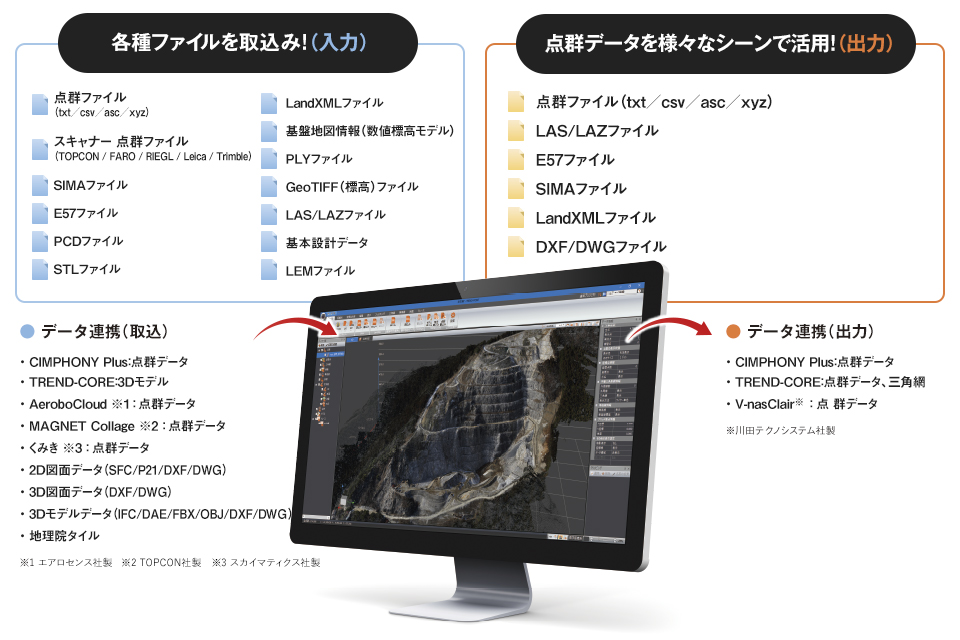
3Dレーザースキャナー、ドローン、MMS(移動計測車両)、マルチビーム等で計測した膨大な点群データをストレスなく取り扱うことができます。数十億点におよぶ大規模点群にも対応しています。
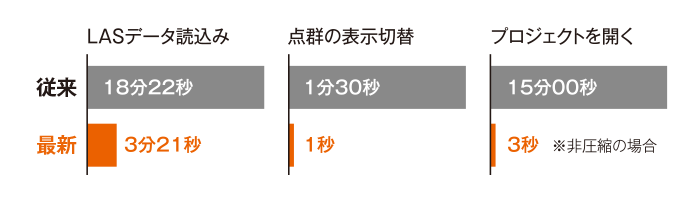
大容量点群の描画レスポンスが大幅に向上!
製品の基盤となるデータベース構造を刷新し、処理速度を飛躍的に高速化しました。物理メモリやGPUメモリを使った処理で、マシンスペックの性能を最大限に引き出す対応も行っています。100億点クラスの膨大な点群データのビューイングも、ストレスなくご利用いただけます。
※大容量点群の処理速度は、PCのスペックが影響します。
グループ機能
点群データや三角網データをグループ化することで、一つのプロジェクト内で時系列毎やブロック毎の表示・運用が可能です。
点群データの読込み・書込み時においても、複数のデータをグループ化して読み込んだり、グループ毎に分割して書き込むなど利便性を向上し、効率的な運用を支援します。
点群の分類と着色
点群の分類
「点の編集」より、選択した点群の分類が可能です。一つの点群データから、分類しておきたい領域や物体などを選択し、別グループに分類することで、一時的な非表示や計算範囲からの除外などが効率的に行えます。

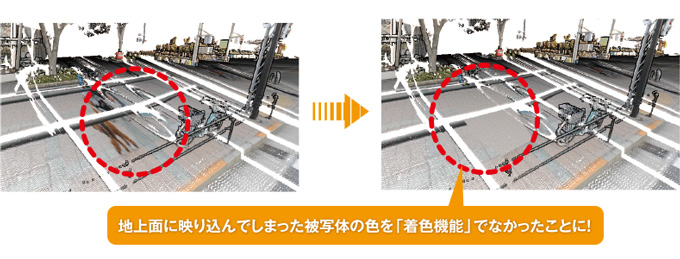
点群の着色
「点の編集」より、選択した点群の着色が可能です。TLSで点群データを取得した際に、地上面に映り込んでしまった被写体の色などを任意選択し、色の変更をすることで、より見やすい点群データを作成することが可能です。
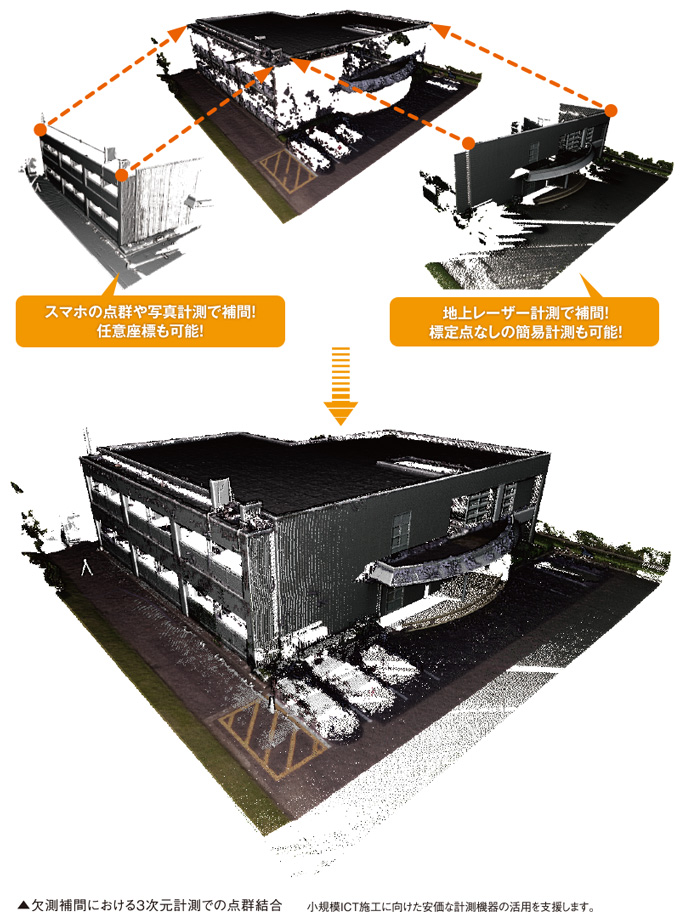
ハイブリッドデータの点群結合支援
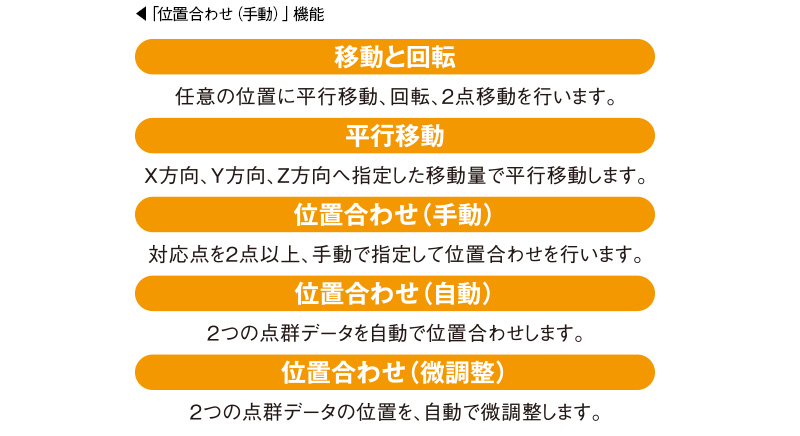
より幅広い点群ファイルの取り込みに対応。iPhone/iPadのLiDAR計測の出力ファイルでも採用されているPLY形式の点群データも読み込みが可能です。地上型レーザースキャナとマルチビームなど、異なる機器・異なる環境で計測した点群データでも、【TREND-POINT】に取り込めば直観的な操作で点群データの位置合わせ、結合が可能です。
多種多彩なフィルタリング
高性能なフィルタリング機能(ごみ取り)を豊富に搭載し、効率的に点群データの削除や分割が行えます。
地表面フィルター
地表面から離れている点を抽出・削除します。樹木を消す場合などに有効です。樹木や建物を消したり、上面のみを抽出することもできます。
推奨パラメータを設定することで、パラメータの値を自動でセットし、悩まずフィルタリングを実行できます。
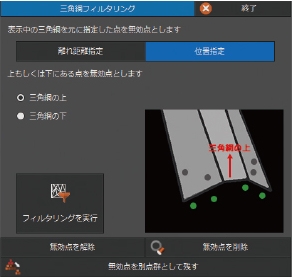
三角網フィルター
表示中の三角網から指定距離以上離れている点、および上部・下部を指定して抽出・削除します。
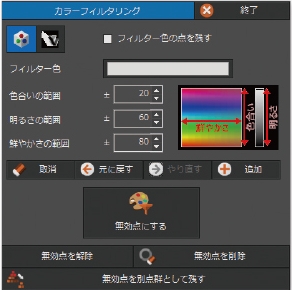
カラーフィルター
指定したRGB値、受光強度を持つ点を抽出・削除します。
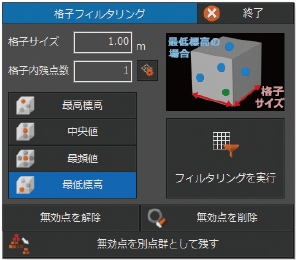
格子フィルター
格子で区切った中の指定した標高値と残点数以外の点を抽出・削除します。
密度フィルター
点密度の低い領域の点を自動で抽出・削除します。
重複点フィルター
同一座標を抽出し、重複点を削除します。
間引きフィルター
点を均等に間引き、データサイズを軽量化します。
自動フィルター
自動で、ノイズフィルタリング、近傍点フィルタリング、地表面フィルタリングを行います。
ノイズフィルター
レーザースキャナーなど計測した点群に含まれるノイズ(ゴミ点)を除去します。
近傍点フィルター
近い距離にある点を抽出し、点群密度を均一化します。
色調補正
点群データの明るさやコントラストを自由に調整できます。天候の影響で暗くなってしまった場合でも、色調補正機能を利用することで撮り直す必要がありません。
集合体抽出
車や人物、樹木など、集合体と認識される点群をワンクリックで選択でき、削除や分割が簡単に行えます。範囲指定による一括抽出にも対応しています。
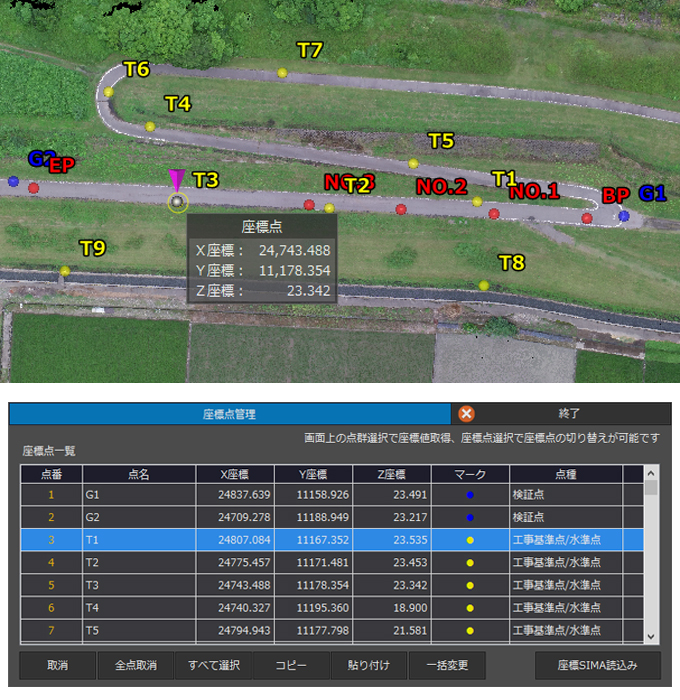
座標点
座標値が分かっている点を目印として配置。測点の配置や工区割り、点検箇所の目印など、利用シーンが大幅に広がります。
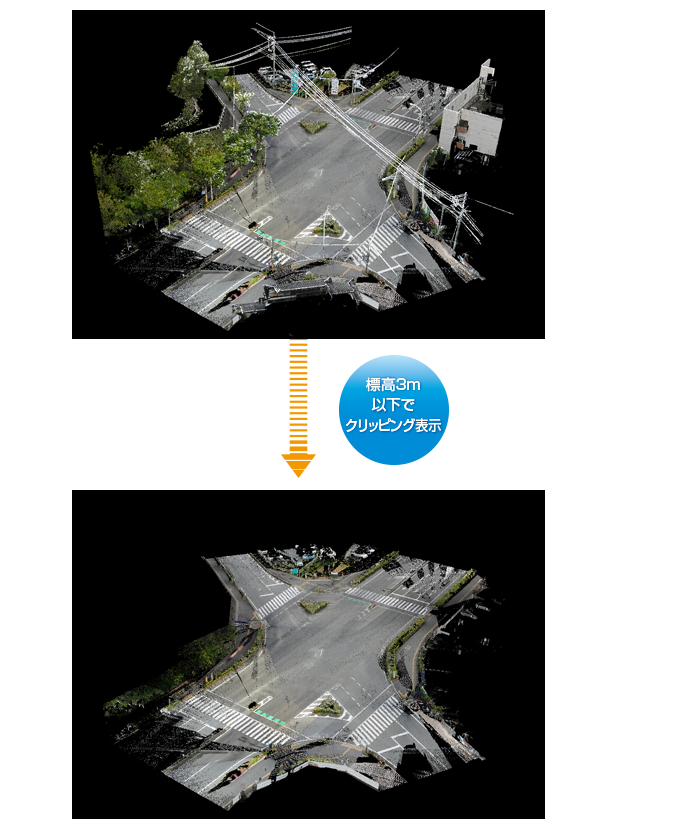
クリッピング機能
点群の一部を図形選択やデータ範囲を指定してクリッピング(切り抜き)が行えます。 作業範囲をクリッピングすることで、効率よく点群の編集作業が行えます。
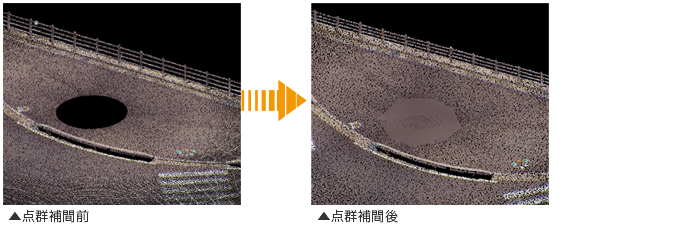
点群補間
3Dレーザースキャナーの設置箇所や樹木下の地表面など、点群データが取得できていない箇所を周辺の点群情報を考慮して穴埋めします。
グリッドデータ作成
ランダムな点群データからUAVやレーザスキャナを用いた公共測量マニュアルや航空測量で規定される構造化作業(グリッドデータ化)が可能です。
三角網(TIN)作成・編集
“i-Construction”の点密度に準拠した三角網の作成や、位置情報付きのオルソ画像の貼り付けによる鮮明な地形の表現が可能です。
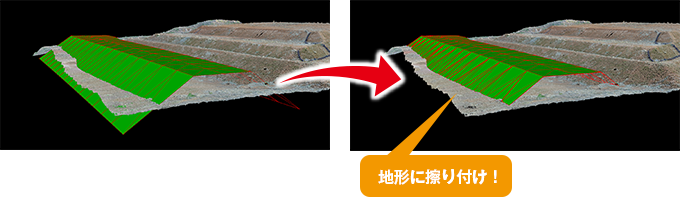
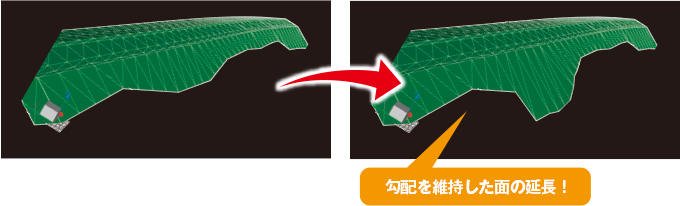
作成した三角網や設計データなど、2つの三角網同士でくり抜くことで、地形に擦り付いた面データも簡単に作成できます。また、作成した三角網の削除や面の延長・追加やブレークラインの設置、オーバーハング等、3D形状の三角網作成にも対応しています。
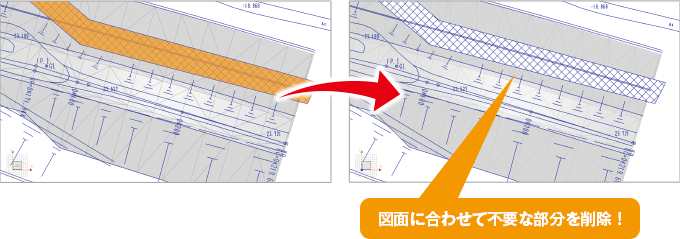
領域削除機能による三角網の削除や分割など、TREND-POINT上で手軽に設計データの加工が行えます。